Transfer Learning in RL
 From My BSc. Project
From My BSc. Project
\
\ \
\ \ \
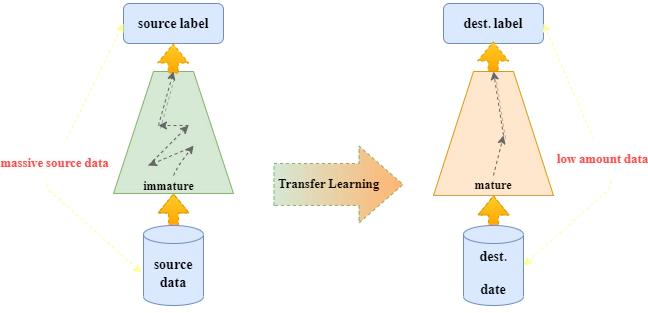
My BSc thesis under the supervision of Prof. Rabiee was about Applications of Transfer Learning in Reinforcement Learning.
Throughout my research on self-driving cars (SDV), I was impressed by the reinforcement learning algorithms’ effect on SDV, but these algorithms heavily rely on expensive sensors like LiDAR, multi-camera, and 3d-camera, etc. which is conducive to the high price of such vehicles these days. Therefore, I was inclined to avoid the collisions only with the help of a single camera (monocular image) and high-level feature extractor.
Moreover, in this thesis, I have tried to train in a simulator to minimize real-world collision due to such systems’ criticality and deployed transfer learning methods to handle distribution shifts between simulation and real-world images.
Amir-Hossein Shahidzadeh
PhD Student
My research is at the intersection of Robot Perception and Reinforcement Learning.